
I had excellent opportunities to conduct a world-rank research on emerging fields. My research activities had provided me with interdisciplinary experience related to human interface, haptic, virtual reality, interactive media systems, human-computer interaction, computer graphics, laser projection, and robotics.
I worked in Japan Advanced Institute of Science and Technology from 2001 to 2003 in a research related to knowledge creation and VR technologies. I explored, implemented, and evaluated the utilizing of collaborative virtual environment, equipped with some learning functionality, in knowledge creation. From 2003 to 2006, I worked at the Virtual System Laboratory in Gifu University as a researcher where I had involved in a collaborative project with the industry where I had the chance to lead the software development for Haptic Interface Robot (HIRO). The work was recognized by NEDO (New Energy and Industrial Technology Development Organization) and exhibited at the World Expo 2005 and considered as one of the Next-Generation Robots and haptic interface. In Iwate University I had been involved in exploring the laser projection technologies and laser graphics. I proposed an innovative new method for drawing and optimizing graphics on laser display and obtained an international patent in this method. I am currently working on many projects related to VR, Gaming, and Interactive Media.
Introduction
Interests
- Haptic
- Virtual Reality
- Human Computer Interaction
- Computer Graphics
- Game Design and Development
- Interactive Media
- Laser Graphics
Research Projects
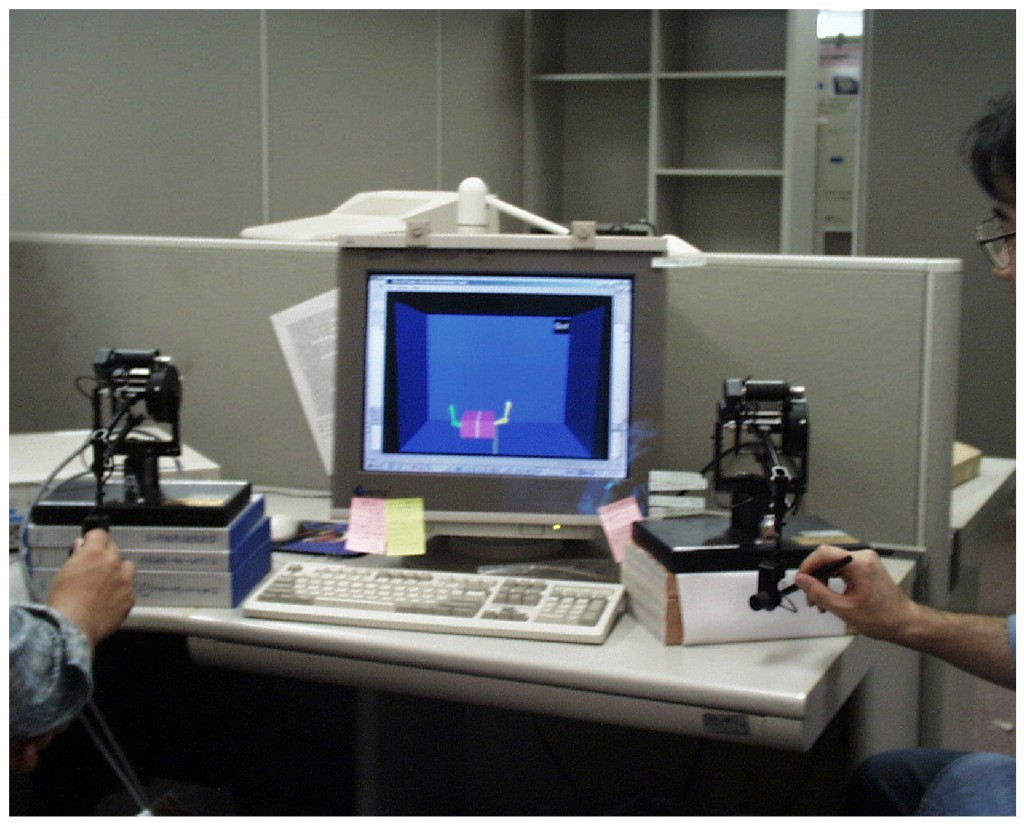
The Haptic Cooperative Virtual Workspace (HCVW), where users can simultaneously manipulate and haptically feel the same object, is beneficial and in some cases indispensable for training a team of surgeons, or in application areas in telerobotics, and entertainment.
In this research we proposed an architecture for the haptic cooperative workspace where the participants can kinesthetically interact, feel and push each other simultaneously while moving in the simulation. This involves the ability to manipulate the same virtual object at the same time. A setup of experiments carried out to investigate the haptic cooperative workspace is reported. A new approach to quantitatively evaluate the cooperative haptic system is proposed, which can be extended to evaluate haptic systems in general.
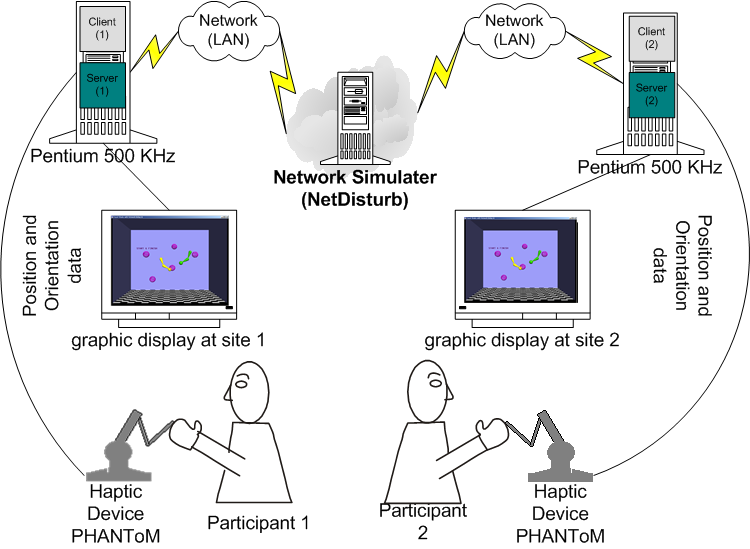
A cooperative shared haptic virtual environment (CSHVE), where the users can kinesthetically interact and simultaneously feel each other over the network, is beneficial for many distributed VR simulations. A little is known about the influences of the network delay on the quality of haptic sensation and the task performance in such environments. This research has addressed these issues by conducting a subjective evaluation to the force feedback and the task performance in a tele-handshake cooperative shared haptic system for different delay setting. Also, four subjective measures to evaluate the quality of haptic in CSHVEs have been proposed. These measures are the feeling of force, the consistency between the haptic-visual feedback, the vibration, and the rebound in the haptic device. In addition, a detailed description of the haptic sensation for different time delays is also described. A network emulator was utilized to simulate the real network cloud.